Overview#
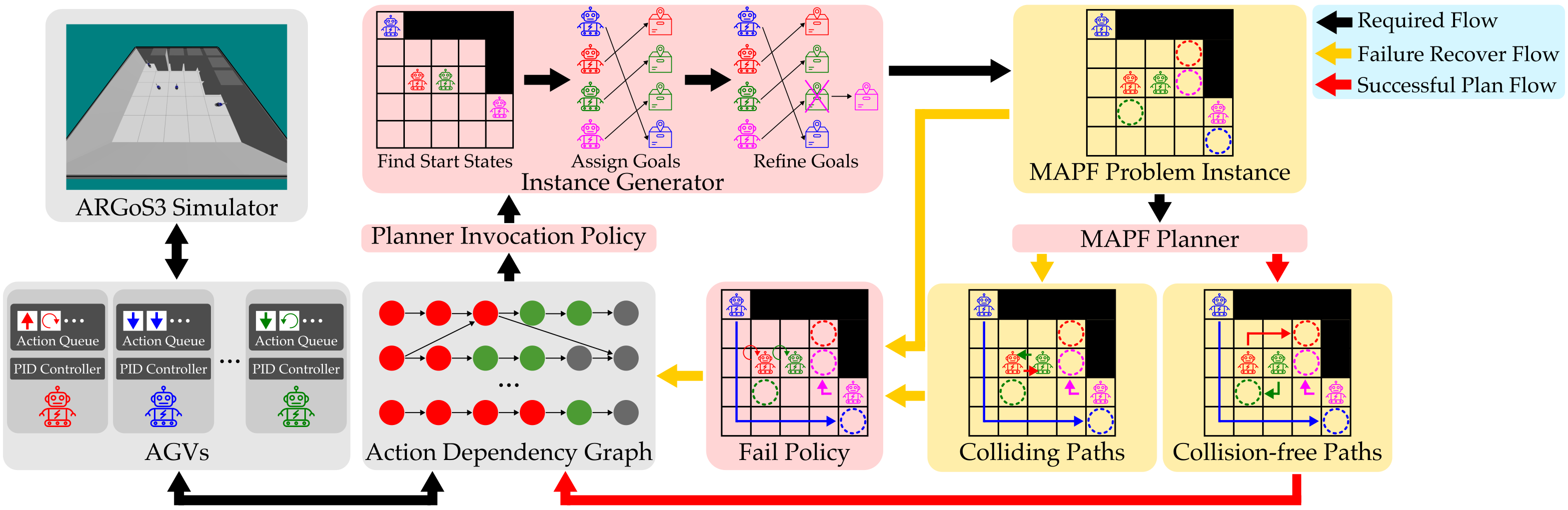
Detailed Architecture of LSMART. Red boxes are user customizable modules, gray boxes are non-customizable modules, and yellow boxes are data structures used for communicating between modules. Black arrows indicates required flow, red arrows indicate flow when the MAPF planner successfully finds collision-free paths, and yellow arrows indicate flow when the planner fails and the system need to recover from failure.#
Lifelong Scalable Multi-Agent Realistic Testbed (LSMART) is an open-source simulator to evaluate any Multi-Agent Path Finding (MAPF) algorithm in a Fleet Management System (FMS) with Automated Guided Vehicles (AGVs) under lifelong MAPF (LMAPF) settings. MAPF aims to move a group of agents from their corresponding starting locations to their goals. Lifelong MAPF (LMAPF) is a variant of MAPF that continuously assigns new goals for agents to reach. LMAPF applications, such as autonomous warehouses, often require a centralized, lifelong system to coordinate the movement of a fleet of robots, typically AGVs. However, existing works on MAPF and LMAPF often assume simplified kinodynamic models, such as pebble motion, as well as perfect execution and communication for AGVs. LSMART consists of 7 modules:
a planner invocation policy: given the current states of the robots, it determines if the planner should be invoked.
a MAPF problem instance generator: given the current states of the robots, it returns the a MAPF problem instance.
a MAPF planner: given a MAPF problem instance with start and goal locations, it returns collision-free paths.
a fail policy: if the MAPF planner fails to return collision-free paths, it recovers the system from failure.
an ADG: an Action Dependency Graph (ADG) that ensures collision-free execution of the planned paths.
a fleet of AGVs: each AGV is modeled as a differentiable drive robot with realistic kinodynamics and execution uncertainties.
an ARGoS3 simulator: the underlying physics engine that simulates the robots and the environment.
A simulation starts by using the planner invocation policy to determine whether the MAPF planner should be invoked. If so, LSMART first uses the instance generator to generate the next MAPF problem instance by computing a commit cut in the ADG to find the start states, assigning goals to AGVs, and refining the goals if necessary. At the start of the simulation, the start locations of the AGVs are randomly generated and their orientation always faces north. The instance is passed to the MAPF planner. If the planner solves it successfully, the collision-free paths are returned directly to the ADG. If it fails, the fail policy replans or resolves the collisions. Depending on the fail policy, the MAPF planner may not be required to send colliding paths to the fail policy. The paths are then converted and added to the ADG, which records a sequence of actions for each AGV with their passing orders in each location. The AGVs and the ARGoS3 simulator run in parallel with the planner. Each AGV is equipped with a PID controller and an action queue. Each agent periodically obtains actions from the ADG following the action dependencies, stores them in the action queue, and executes them in the ARGoS3 simulator. If no actions are left, it waits in place. The simulation stops after a pre-defined amount of time.